Continuation of state of the art
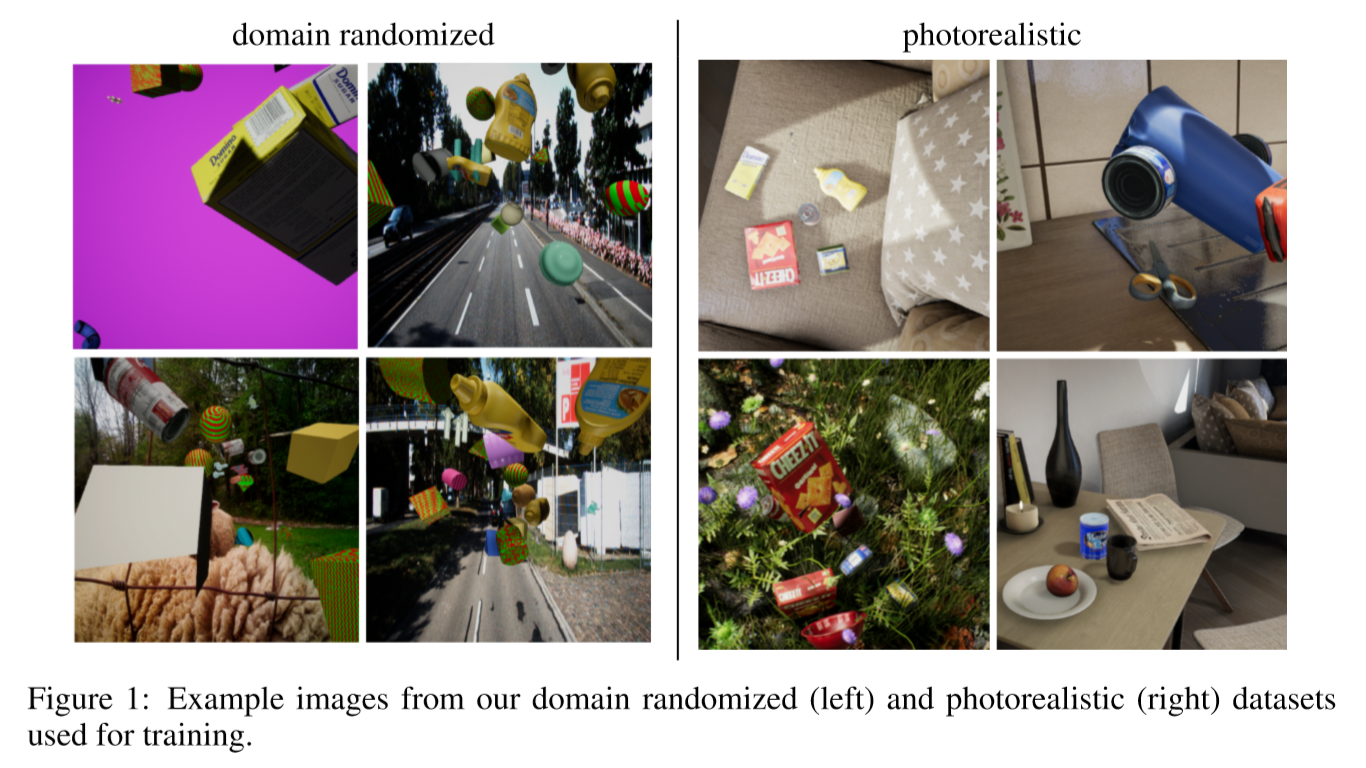
On the last weeks, i learned about the domain randomization, in which the training data is randomized in non-realistic ways so that, at test time, real data appears to the net- work as simply another variation. Regarding this in a paper, i explored a powerful complement to domain randomization (DR) namely, using photorealistic data. They show that a simple combination of DR data with such photorealistic data yields sufficient variation and complexity to train a deep neural network that is then able to operate on real data without any fine-tuning. Additionally, their synthetically trained network generalizes well to a variety of real-world scenarios, including various backgrounds and extreme lighting conditions.
Their contributions are thus as follows:
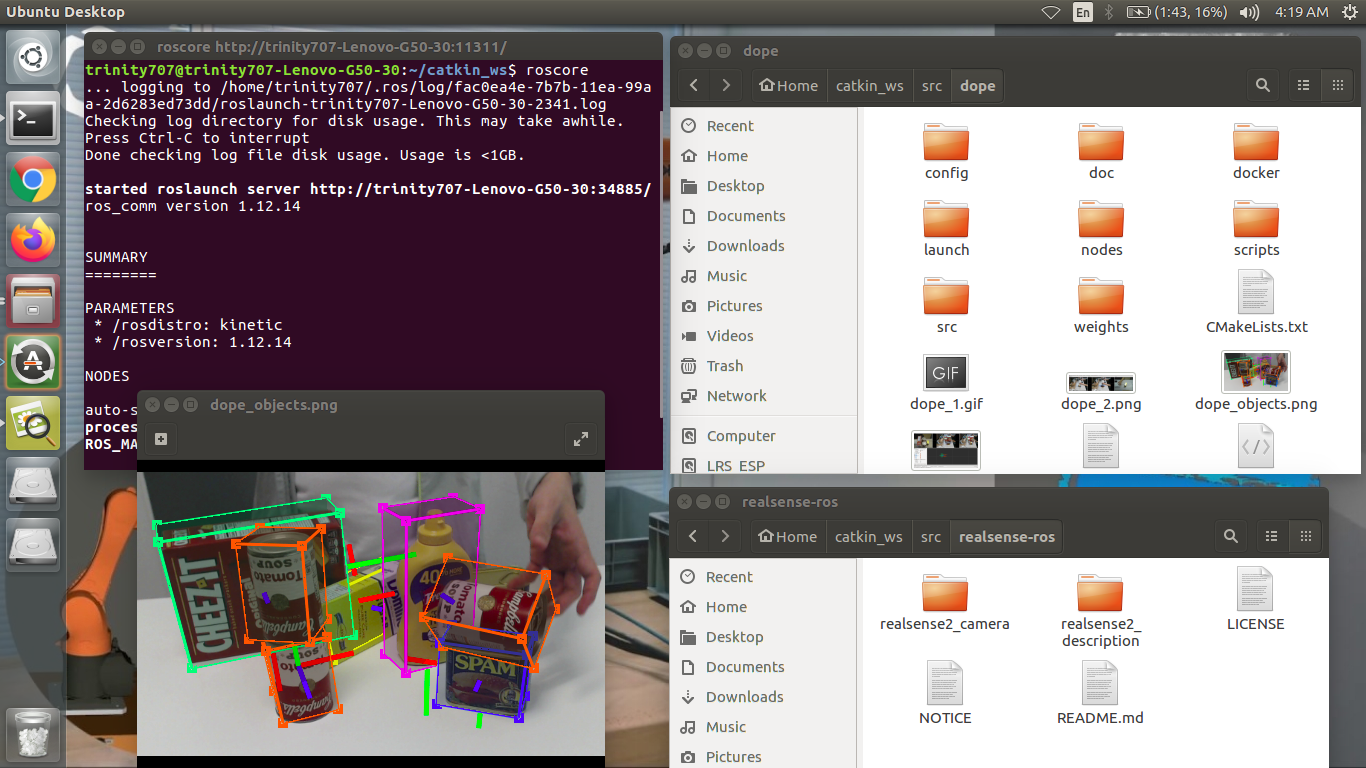
The authors of this paper produced this pose estimation algorithm, which is called DOPE which stands for Deep object Pose Estimation. This is a state of art pose estimation and i decided to use this mainly for my research. So that i can focus on eliminating other problems not just about the concept of pose estimation and its mathematics.
DOPE (Deep Object Pose Estimation) code implementing in ROS Enviornment
They propose a two-step solution to address the problem of detecting and estimating the 6-DoF pose of all instances of a set of known household objects from a single RGB image first, a deep neural network estimates belief maps of 2D keypoints of all the objects in the image coordinate system. Secondly, peaks from these belief maps are fed to a standard perspective-n-point (PnP) algorithm to estimate the 6-DoF pose of each object instance
This https://github.com/NVlabs/Deep_Object_Pose is the official DOPE ROS package for detection and 6-DoF pose estimation of known objects from an RGB camera. The network has been trained default on the following YCB objects: cracker box, sugar box, tomato soup can, mustard bottle, potted meat can, and gelatin box.
Followed the instructions and installed successfullyin my system.